Control Systems
Control System Design
Practice questions from Control System Design.
22
Total0
Attempted0
Correct0
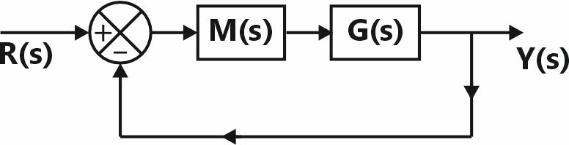
IncorrectLet be the transfer function of a second-order system. A controller is connected to the system in the configuration shown below.
Consider the following statements.
(i) There exists no controller of the form , where is a positive real number, such that the closed loop system is stable.
(ii) There exists at least one controller of the form , where and are positive real numbers, such that the closed loop system is stable.
Which one of the following options is correct?
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
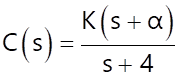
Sign in to UnlockA satellite attitude control system, as shown below, has a plant with transfer function cascaded with a compensator , where K and are positive real constants.
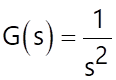

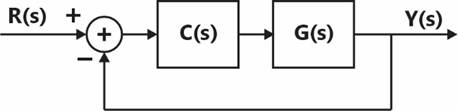
In order for the closed-loop system to have poles at , the value of must be ________.

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockA unity feedback system that uses proportional. integral (PI) control is shown in the figure.

The stability of the overall system is controlled by tuning the PI control parameters and . The maximum value of that can be chosen so as to keep the overall system stable or, in the worst case, marginally stable (rounded off to three decimal places) is ________.


Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockWhich of the following can be the pole-zero configuration of a phase-lag controller (lag compensator)?




Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockWhich of the following statements is incorrect?
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockA lead compensator network includes a parallel combination of R and C in the feed-forward path. If the transfer function of the compensator is , the value of RC is ________.

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockFor the following feedback system. The 2%-settling time of the step response is required to be less than 2 seconds.


Which one of the following compensators C(s) achieves this?
3




Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe transfer function of a first-order controller is given as . Where K, a and b are positive real numbers. The condition for this controller to act as a phase lead compensator is

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe transfer function of a compensator is given as

is a lead compensator if

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe transfer function of a compensator is given as
The phase of the above lead compensator is maximum at




Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockA unity negative feedback closed loop system has a plant with the transfer function and a controller in the feed forward path. For a unit step input, the transfer function of the controller that gives minimum steady state error is






Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe magnitude plot of a rational transfer function G(s) with real coefficients is shown below. Which of the following compensators has such a magnitude plot?

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockGroup I gives two possible choices for the impedance Z in the diagram. The circuit elements in Z satisfy the condition . The transfer function represents a kind of controller. Match the impedances in Group I with the types of controllers in Group II.



Group I


Group II
1. PID controller
2. Lead compensator
3. Lag compensator
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe open-loop transfer function of a plant is given as . If the plant is operated in a unity feedback configuration, then the lead compensator that can stabilize this control system is





Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe transfer function of a phase lead controller is. The maximum value of phase provided by this controller is





Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockWhich one of the following polar diagrams corresponds to a lag network?




Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockA double integrator plant, , is to be compensated to achieve the damping ratio , and an un-damped natural frequency, . Which one of the following compensator will be suitable?









Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockA PD controller is used to compensate a system. Compared to the uncompensated system, the compensated system has
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockA unity feedback system has the plant transfer function

(a) Determine the frequency at which the plant has a phase lag of 90º
(b) An integral controller with transfer function is placed in the feed-forward path of the feedback system. Find the value of k such that the compensated system has an open-loop gain margin of 2.5.

(c) Determine the steady state errors of the compensated system to unit-step and unit-ramp inputs.
(a)

(b) k=0.6
(b) k=0.8
(c) Steady state error = 1.667
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockFor the feedback control system shown in Figure, the process transfer function is , and the simplification factor of the power amplifier is . The design specifications required for the system are a time constant of 1 sec and a damping ratio of 0.707.



(a) Find the desired locations of the closed loop poles.
(b) Write down the required characteristic equation for the system. Hence determine the PD controller transfer function when K=1.

(c) Sketch the root-locus for the system.
(a)


(b)

(c)

(b)

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockTachometer feedback in a DC position control system enhances stability. ( True=1, False=0)
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockA process with open-loop model is controlled by a PID controller. For this process

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to Unlock