Engineering Mathematics
Linear Algebra
Practice questions from Linear Algebra.
70
Total0
Attempted0
Correct0
IncorrectConsider the set of points which minimize the real valued function

Which of the following statements is true about the set S?
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockLet and be the two eigenvectors corresponding to distinct eigenvalues of a real symmetric matrix. Which one of the following statements is true?
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockLet , and . Then, the system of linear equations has
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockLet and let I can be identity matrix. Then is equal to
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockWhich one of the following matrices has an inverse?
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe sum of the eigenvalues of the matrix is ________ (rounded off to the nearest integer).
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockFor a given vector , the vector normal to the plane defined by is
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockIn the figure, the vectors and are related as: by a transformation matrix A. The correct choice of is
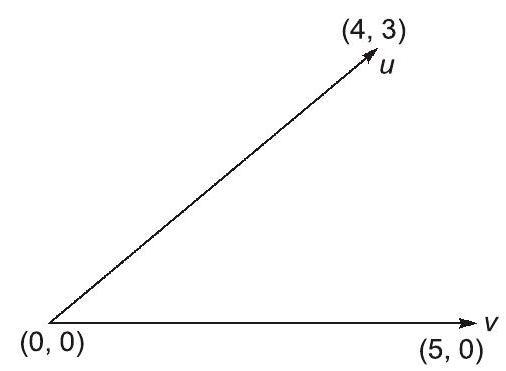
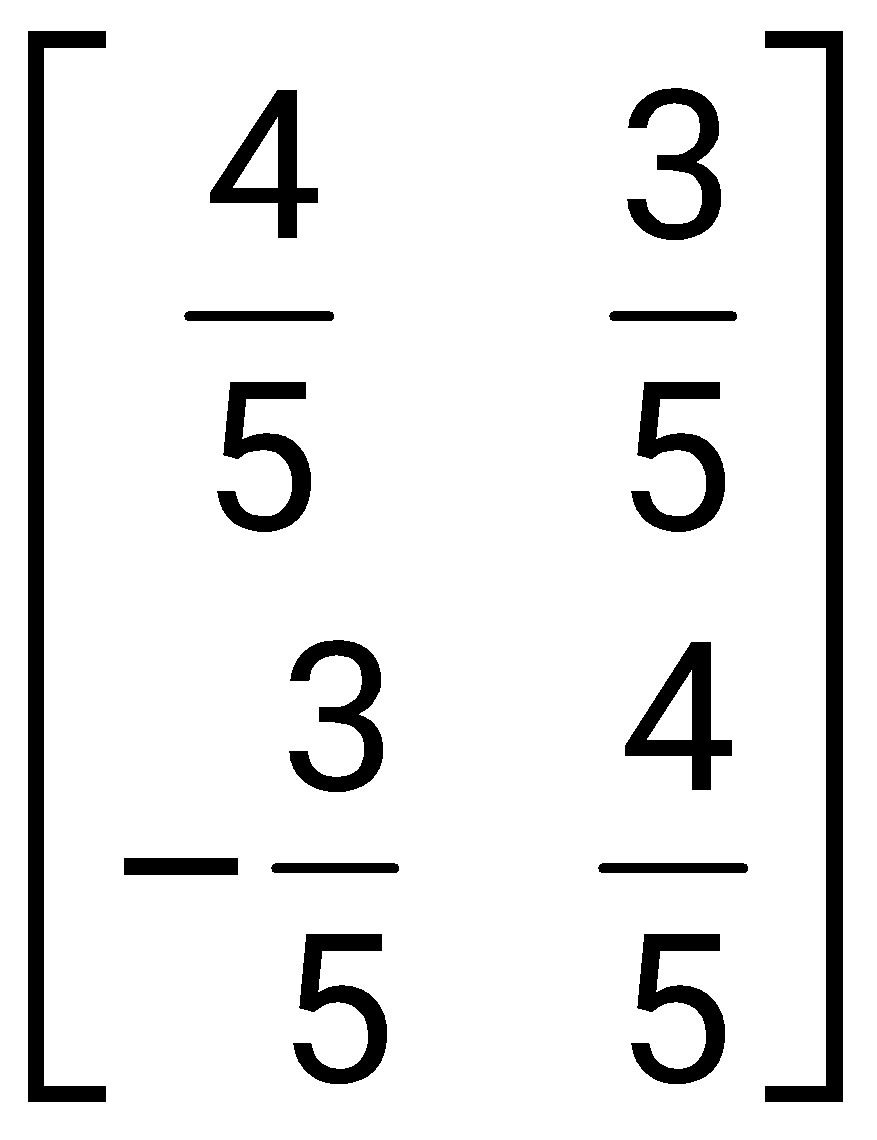
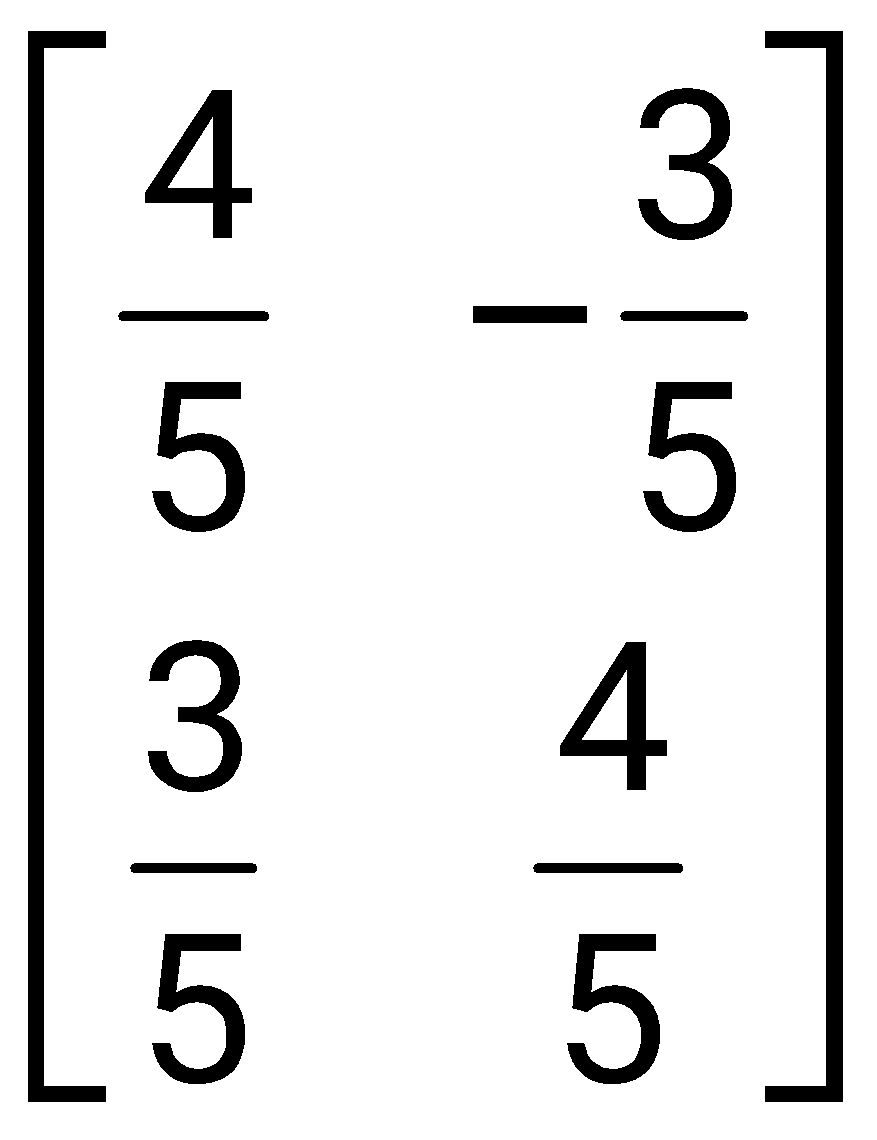
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockConsider a matrix whose -th element, . Then the matrix will be




Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to Unlockdenotes the exponential of a square matrix . Suppose is an eigen value and is the corresponding eigen-vector of matrix .



Consider the following two statements:
Statement 1: is an eigen value of .

Statement 2: is an eigen-vector of .
Which one of the following options is correct?
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockConsider a matrix . The matrix satisfies the equation , where and are scalars and is the identity matrix. Then is equal to






Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockLet and be real numbers such that .



The eigenvalues of the matrix are

pq and –pq
1 and 1
and


1 and -1
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockLet be a matrix such that is null matrix, and let be the identity matrix. The determinant of is _______.



Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe number of purely real elements in a lower triangular representation of the given matrix, obtained through the given decomposition is

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe rank of the matrix, is __________________.

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockM is a 2 × 2 matrix with eigenvalues 4 and 9. The eigenvalues of are

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockConsider a matrix , where, and are the column vectors. Suppose , where and are the row vectors. Consider the following statements:







Statement 1:

Statement 2:

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockConsider a non-singular square matrix A If and, the determinant of the matrix A is ________ (up to 1 decimal place).


Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockLet and, where I is identity matrix. The determinant of B is ______ (up to 1 decimal place).


Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe eigen values of the matrix given below are
.

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe matrix has three distinct eigenvalues and one of its eigenvectors is . Which one of the following can be another eigenvector of A?






Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockLet and . The value of equals _________. (Give the answer up to three decimal places)



Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockConsider a matrix with every element being equal to 1. Its only non-zero Eigen value is ___________.

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockLet the Eigen values of a matrix A be 1, -2 with eigenvectors and respectively. Then the Eigen values and eigenvectors of the matrix would, respectively, be







Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockLet A be a real matrix with rank 2. Which one of the following statement is TRUE?

Rank of is less than 2

Rank of is equal to 2

Rank of is greater than 2
Rank of can be any number between 1 and 3
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockA matrix P is such that, . Then the eigenvalues of P are

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockLet . Consider the set S of all vectors such that where . Then S is




a circle of radius

a circle of radius

an ellipse with major axis along

an ellipse with minor axis along
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockIf the sum of the diagonal elements of a 2 x 2 matrix is -6, then the maximum possible value of determinant of the matrix is ____________.
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe maximum value of ‘a’ such that the matrix has three linearly independent real eigenvectors is





Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockWe have a set of 3 linear equations in 3 unknowns. ‘X = Y’ means X and Y are equivalent statements and means X and Y are not equivalent statements.

P. There is a unique solution.
Q. The equations are linearly independent.
R. All Eigen values of the coefficient matrix are nonzero.
S. The determinant of the coefficient matrix is nonzero.
Which one of the following is TRUE?




Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockGiven a system of equations:


Which of the following is true regarding its solutions
The system has a unique solution for any given

The system will have infinitely many solutions for any given
Whether or not a solution exists depends on the given
The system would have no solution for any values of

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockA system matrix is given as follows.

The absolute value of the ratio of the maximum Eigen value to the minimum Eigen value is ______________.
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockWhich one of the following statements is true for all real symmetric matrices?
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockTwo matrices A and B are given below:

If the rank of matrix A is N, then the rank of matrix B is
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe equation has

No solution
Only one solution

Non-zero unique solution
Multiple solutions
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockA matrix has Eigen values –1 and -2. The corresponding eigenvectors are and respectively. The matrix is






Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockGiven that
and , the value of is



Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe matrix is decomposed into a product of a lower triangular matrix [L] and an upper triangular matrix [U]. The properly decomposed [L] and [U] matrices respectively are





Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockAn eigenvector of is





Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockFor the set of equations


The following statement is true:
Only the trivial solution exists.

There are no solutions.
A unique non-trivial solution exists
Multiple non-trivial solutions exist
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe trace and determinant of a 2 × 2 matrix are known to be -2 and -35 respectively. Its Eigen values are
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe characteristic equation of a (3 × 3) matrix P is defined as. If I denote identity matrix, then the inverse of matrix P will be





Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockIf the rank of a (5×6) matrix Q is 4, then which one of the following statements is correct?
Q will have four linearly independent rows and four linearly Independent columns
Q will have four linearly Independent rows and five linearly Independent columns
will be invertible

will be invertible

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockA is a m×n full ran matrix with m > n and I is an identity matrix. Let matrix. Then, which one of the following statements is FALSE?





Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockLet P be a 2 ´ 2 real orthogonal matrix and is a real vector with length. Then, which one of the following statements is correct?



where at least one vector satisfies


for all vectors


where at least one vector satisfies


No relationship can be established between and


Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to Unlockis an n-tuple nonzero vector. The n × n matrix


Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockLet x and y be two vectors in a 3 dimensional space and <x, y> denote their dot product. Then the determinant

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe linear operation L(x) is defined by the cross product , where and are three dimensional vectors. The 3×3 matrix M of this operation satisfies




Then the Eigen values of M are
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockCayley-Hamilton Theorem states that a square matrix satisfies its own characteristic equation.
Consider a matrix

A satisfies the relation




Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockCayley-Hamilton Theorem states that a square matrix satisfies its own characteristic equation.
Consider a matrix
equals





Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to Unlockare three vectors

An orthogonal set of vectors having a span that contains p, q, r is




Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to Unlockare three vectors
The following vector is linearly dependent upon the solution to the previous problem




Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockIn the matrix equation Px = q, which of the following is a necessary condition for the existence of at least one solution for the unknown vector x:
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockFor the matrix , one of the Eigen values is equal to –2. Which of the following is an Eigen vector?





Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockIf , the top row of is:






Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe determinant of the matrix
is:

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockA set of linear equations is represented by the matrix equation Ax=b the necessary condition for the existence of a solution for this system is:
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe vector is an Eigen vector of . One of the given values of A is:


Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe sum of the Eigen values of the matrix A is:

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe inverse of A is:





Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockA square matrix is called singular, if its
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockGauss-Seidel iterative method can be used for solving a set of
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockExpress the given matrix A as a product of two triangular matrices, L and U, where the diagonal elements of the lower triangular matrix L are unity and U is an upper triangular matriX




None
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockA set of three linear equations with unknowns X, Y and Z is shown below

Decompose the coefficient matrix into an upper triangular matrix and then solve for the unknowns, X, Y and Z.




Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe inverse of the matrix is:





Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockGiven the matrix. Its Eigen values are ____________.

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to Unlockmatrix has all its entries equal to -1. The rank of the matrix is

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe eigen-values of the matrix are

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockIf two vectors u and v in a plane are linearly independent, then, they cannot be collinear. ( True=1, False=0)
Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to UnlockThe number of linearly independent solutions of the system of equations , is equal to _________________

Explanation Locked!
Unlock this branch to view the explanation, track, bookmark and more.
Sign in to Unlock